STANFORD AEROASTRO ’29
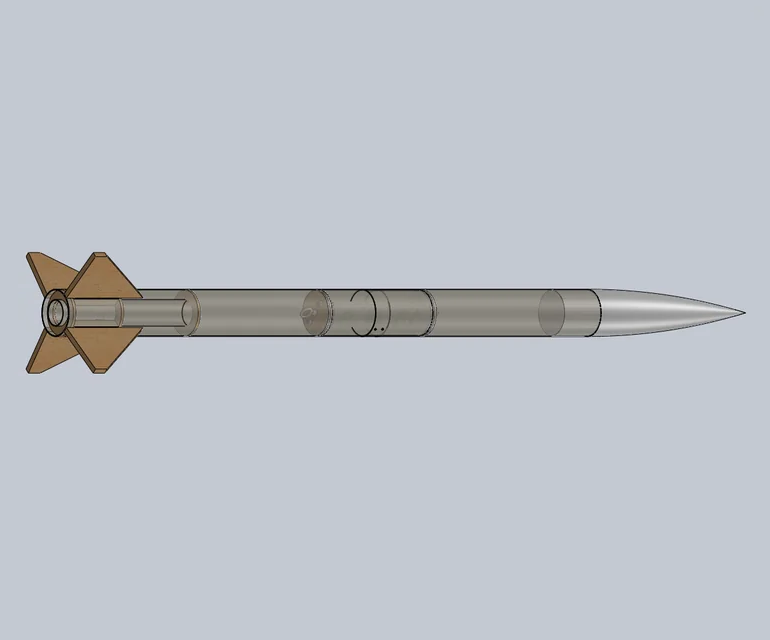
Tiger Strake
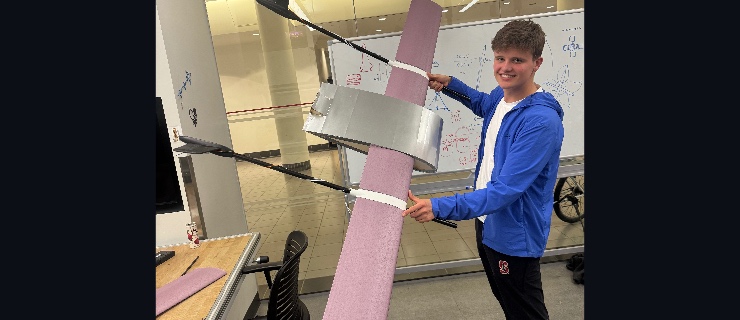
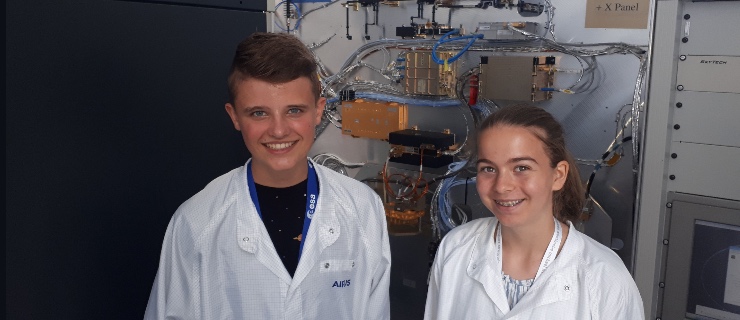
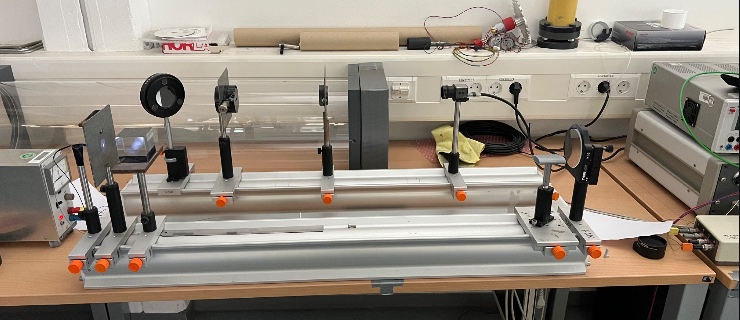
I'm a Stanford AeroAstro student focused on aerospace hardware: high-power rockets, fixed-wing UAVs, embedded controls, and fabrication-heavy test rigs. Before turning 16, I interned at the European Space Agency and EUMETSAT, and worked on hypersonic hardware testing at DLR.
I hold EASA and FAA private pilot licenses. At Stanford, I serve as Chief Engineer of SkyRunners, where we're building a 12-foot wingspan UAV.
Yes, my real name is Tiger.
Stanford AeroAstro Class of 2029
ESA BepiColombo, LISA Pathfinder
DLR Mach 10 hypersonic testing
EUMETSAT Satellite operations
Harvard Digital fabrication
EASA + FAA PPL SEP, night, helicopter in training
↑ The background is a live gravity simulator — use the toolbar to create black holes & launch satellites